Getting min&max vectors from bounds. #
float bd[]=primintrinsic(...,"bounds",...);
vector bbmin=set(bd[::2]);
vector bbmax=set(bd[1::2]);
v@scale=bbmax-bbmin;
In DOP network or a SOP solver we usually don’t have access to the history of the attributes. Here is how you can easily fix this inconvenience.
i[]@_dead_list;
append(@_dead_list, int(@_dead));
if (len(@_dead_list) > 10)
removeindex(@_dead_list, 0);
Point Cloud #
// Average V
float radius = chf("search_radius");
int maxpts = chi("search_max_pts");
int handle = pcopen(@OpInput2, "P", v@P, radius, maxpts);
// avarage velocity within the radius
vector avg_V = pcfilter(handle, "vel");
v@force += avg_V;
VEX create polygons
// Create four points, each represented by a unique integer ID
int pt1 = addpoint(0, set(1,0,1)); // Top-right corner (x=1, y=0, z=1)
int pt2 = addpoint(0, set(0,0,1)); // Top-left corner (x=0, y=0, z=1)
int pt3 = addpoint(0, set(0,0,0)); // Bottom-left corner (x=0, y=0, z=0)
int pt4 = addpoint(0, set(1,0,0)); // Bottom-right corner (x=1, y=0, z=0)
// Create an empty polygon primitive (also gets a unique ID)
int prim = addprim(0, "poly");
// Add each point as a vertex to the polygon (connecting them in order)
addvertex(0, prim, pt1);
addvertex(0, prim, pt2);
addvertex(0, prim, pt3);
addvertex(0, prim, pt4);
even better version
// Define point coordinates in a more organized way
vector pts[] = {
{1, 0, 1}, // Top-right
{0, 0, 1}, // Top-left
{0, 0, 0}, // Bottom-left
{1, 0, 0} // Bottom-right
};
// Create points and polygon in a single loop
int prim = addprim(0, "poly");
for (int i = 0; i < len(pts); i++) {
int pt = addpoint(0, pts[i]);
addvertex(0, prim, pt);
}
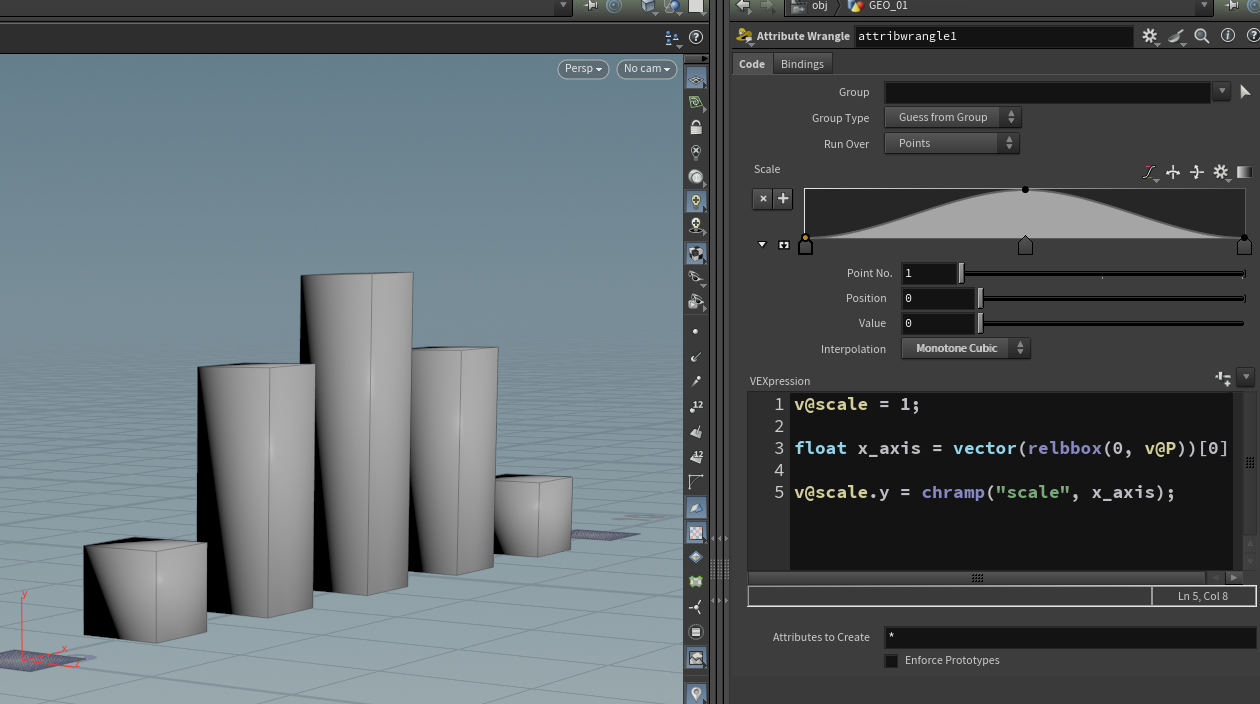
Scale boxes and control the height using ramp